










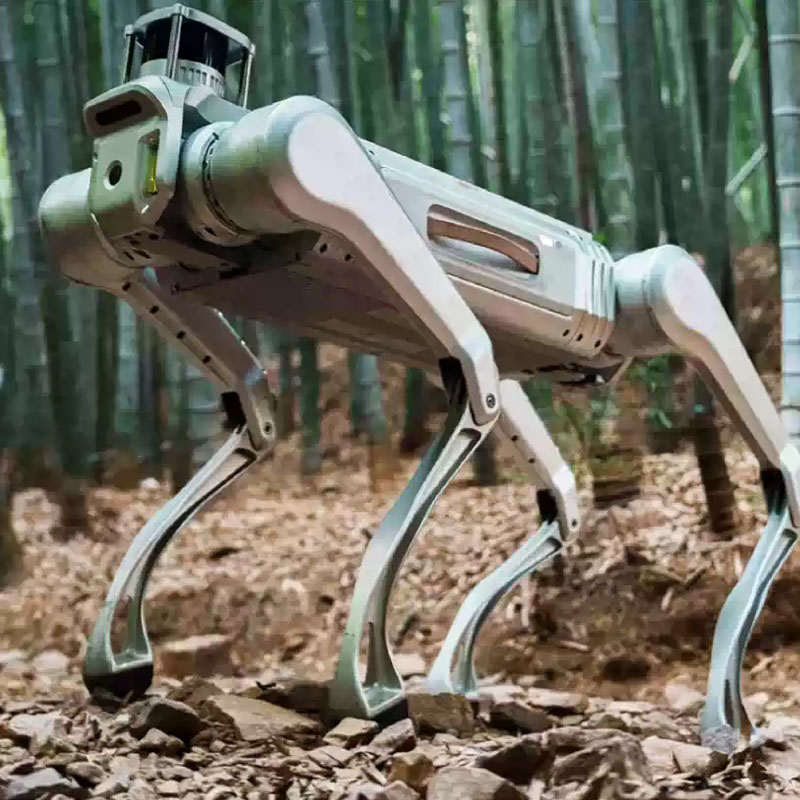
魔法原子Y1四足机器狗作为工业级高负载装备,搭载8组自研集成式驱动模组,承担关节动力传递与转速调节的核心功能,直接决定机器狗的行走稳定性、负载能力及越障性能,适配矿山辅助、户外巡检、应急救援等严苛场景。长期在高频重载、复杂地形及多粉尘环境下运行,驱动模组易出现不同程度磨损,主要表现为动力输出衰减、运行异响、关节动作卡顿,严重时会导致模组抱死、无法正常驱动关节,加剧电机损耗,影响设备作业连续性。广州铁牛机器人深耕该机型运维领域,熟悉其驱动模组“电机+减速器+驱动板”一体化结构,结合大量一线运维案例,梳理出专属磨损诊断思路,可精准检测磨损程度、锁定故障部位,规避盲目拆解造成的精密部件二次损伤,为设备稳定运行提供专业支撑。
魔法原子Y1四足机器狗驱动模组磨损维修,需贴合其工业级驱动模组特性,遵循“磨损分级检测—靶向修复—精准校准”的核心逻辑,兼顾魔法原子机器人维修精度与设备后续运行稳定性。维修前期,借助专业检测工具检测驱动模组齿轮磨损、轴承损耗及电机运行状态,结合广州铁牛机器人搭建的该机型驱动模组磨损故障数据库,区分轻度、中度、重度磨损,制定差异化维修方案。修复过程中,轻度磨损可通过专业打磨修复齿轮表面、清洁模组内部、加注适配的专用润滑介质;中度及重度磨损则更换同规格原厂驱动模组,按规范完成安装、密封与接线,确保动力传递精准。广州铁牛机器人严格规范各环节操作,严控安装同轴度与接线精度,魔法原子机器人维修完成后通过空载、负载多工况测试,确认驱动模组运行顺畅、无异常异响,动力输出达标,确保机器狗恢复稳定运行,适配各类严苛工业场景需求。
广州铁牛机器人技术有限公司专注于解决主流国产人形机器人在实际运行中的共性与个性技术痛点。公司具备对控制器、电源管理模块、力控单元、驱动器及感知系统执行模块级乃至芯片级修复的能力,可针对不同品牌、不同场景的差异化需求提供精准魔法原子机器人维修方案:面向智元“远征”A2/A3等科研平台,满足其高动态响应与多模态协同的灵敏度要求;针对宇树H1/H2、G1、R1系列,应对高自由度关节与轻量化结构带来的维护挑战;为优必选Walker S系列、魔法原子、逐际动力LIMXO、星动纪元星动L7、达闼Cloud Ginger等机型,量身定制适配其机械接口、电控协议与运动逻辑的检修流程。技术团队深入掌握各品牌人形机器人的拆装规范、故障特征与标定体系,擅长在不损伤精密结构的前提下,完成伺服模组、主控板、六维力传感器、IMU及视觉系统等关键部件的深度修复与性能复原。铁牛机器人在人形机器人运维领域已建立“快诊断、精修复、稳交付”的服务标准,为人形机器人从实验室走向规模化应用提供坚实可靠的后市场技术支撑。






















 冀公网安备13010402002588
冀公网安备13010402002588